

Project information
- Category: Simulation
- Goal: Position controller, where the coordinates that will serve as the destination are inserted.
- Project date: 2021- 2021
- Project URL: https://github.com/marcellabecker/turtle
PROJECT TURTLESIM
A simple way to learn the basics of ROS is by using the turtlesim simulator, which consists of simulating of a graphical window showing a turtle-shaped robot. This turtle can be moved by the entire window using ROS commands like roscore, rosrum... or
using the keyboard/joystick.
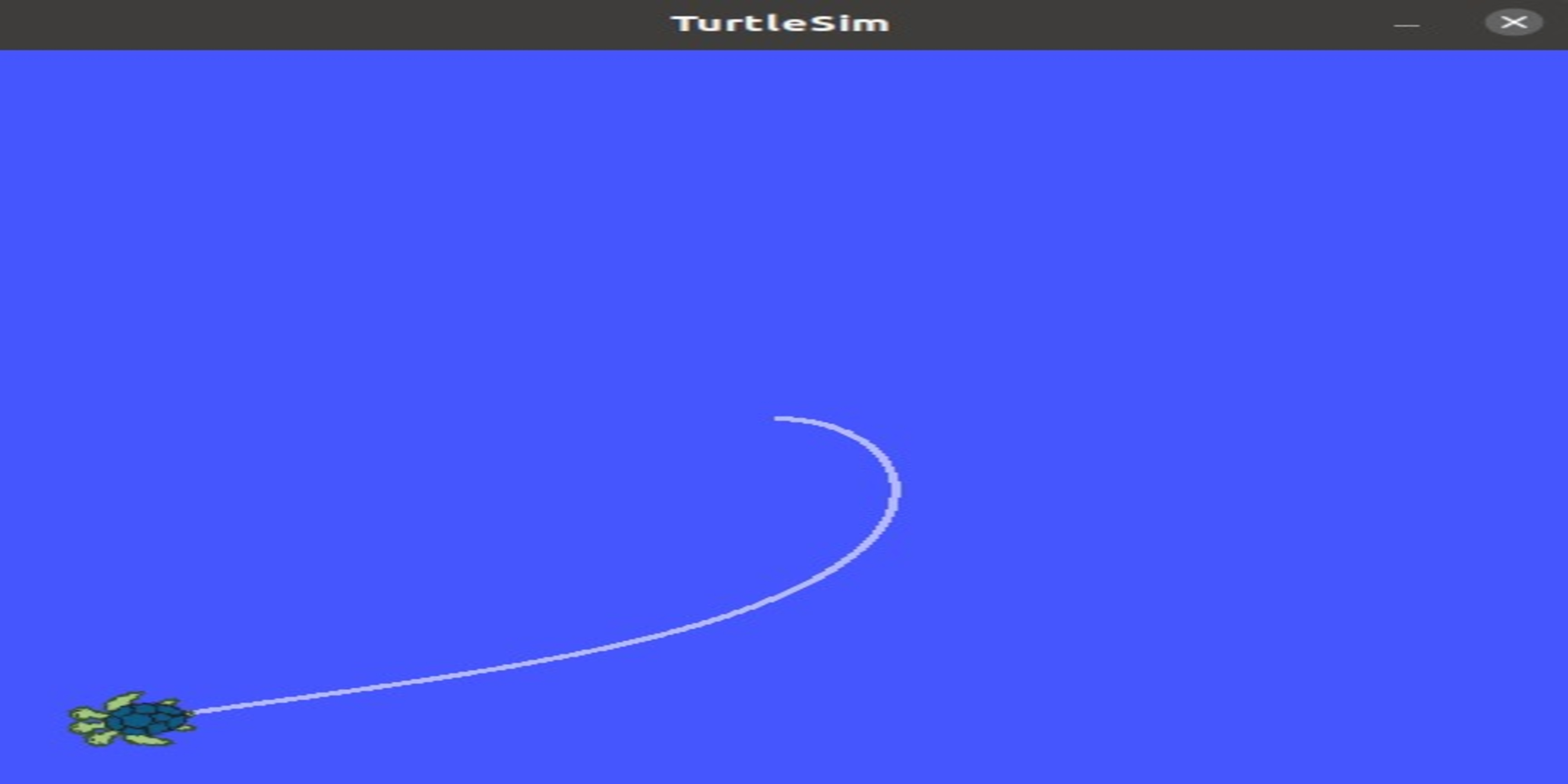
The objective of this challenge is to make a position controller for the turtle, where the user will enter coordinates and this information will serve as a destination for the turtle with a certain associated error.
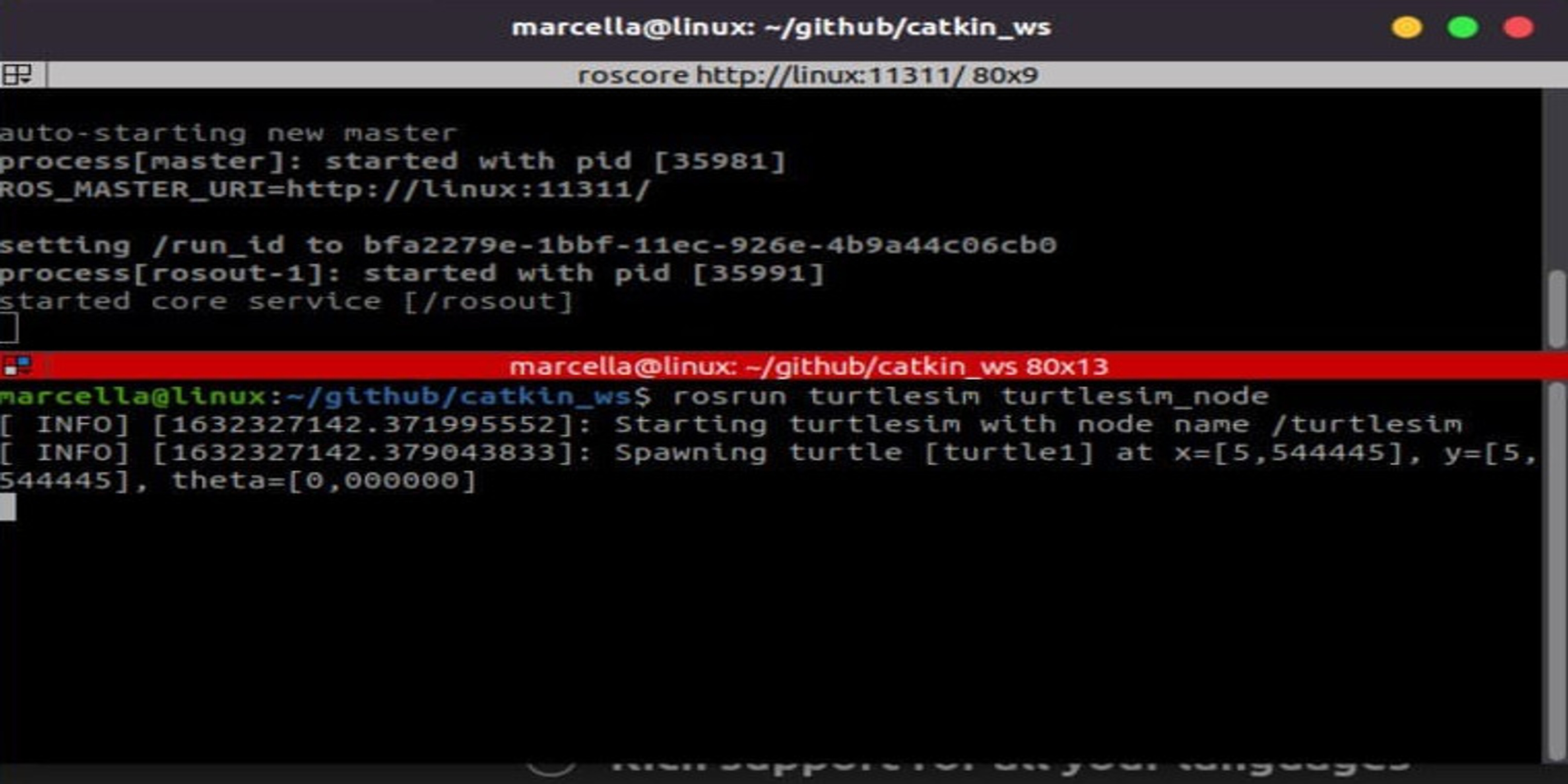
For the challenge to be fulfilled, it is necessary to rotate the $roscore and the node so that the turtle window appears on the screen.
Finally, the .py file is executed, which was the language chosen to complete this challenge, as shown in the figure below.
The x and y coordinates are put in the case of the challenge example is 1 and 1 and the turtle must go to this coordinate when the error is at most 0.1.