PROJECT RASPODE
The Raspode project consists in the construction of a hexapod robot capable of getting around in different types of terrain, avoiding obstacles and adapting
to different types of environments. With the study of stability and different movements, the scraper is being developed to reach areas of difficult mobility
for the human being, generating reports of terrain conditions and location of people. To this end, the MapVision project guides its movement,
in addition to detecting victims at the places of use.
Materials
18 - Servo Motor
01 - Raspberry Pi 3
02 - PCA9685
01 - Bateria 12V
02 - Regulador de tensão 5V
Detailed operation of Raspode
A hexapod robot is a mechanical device with a structure similar to that of an insect that walks on six legs, in order to promote greater locomotion and flexibility,
it is equipped with sensors and actuators that allow it to move on different surfaces and deviate from possible obstacles.
The Raspode will be able to move with three degrees of freedom and will use servomotors to control each of its joints. Each articulated paw will have three servomotors,
controlled by a micro controller distributed in the tibia, thigh and femur segments. The Raspode locomotion can be divided into dynamic locomotion, such as running,
and stable locomotion, such as walking.
RAS CHAPTER INITIATIVE GRANT
The Raspode project received, at the end of 2021, a funding of $1000 from the RAS CHAPTER INITIATIVE GRANT! This is RAS Cimatec's second funding.
In 2020, the BAYIEEEMAX project was awarded the maximum amount of $2000.
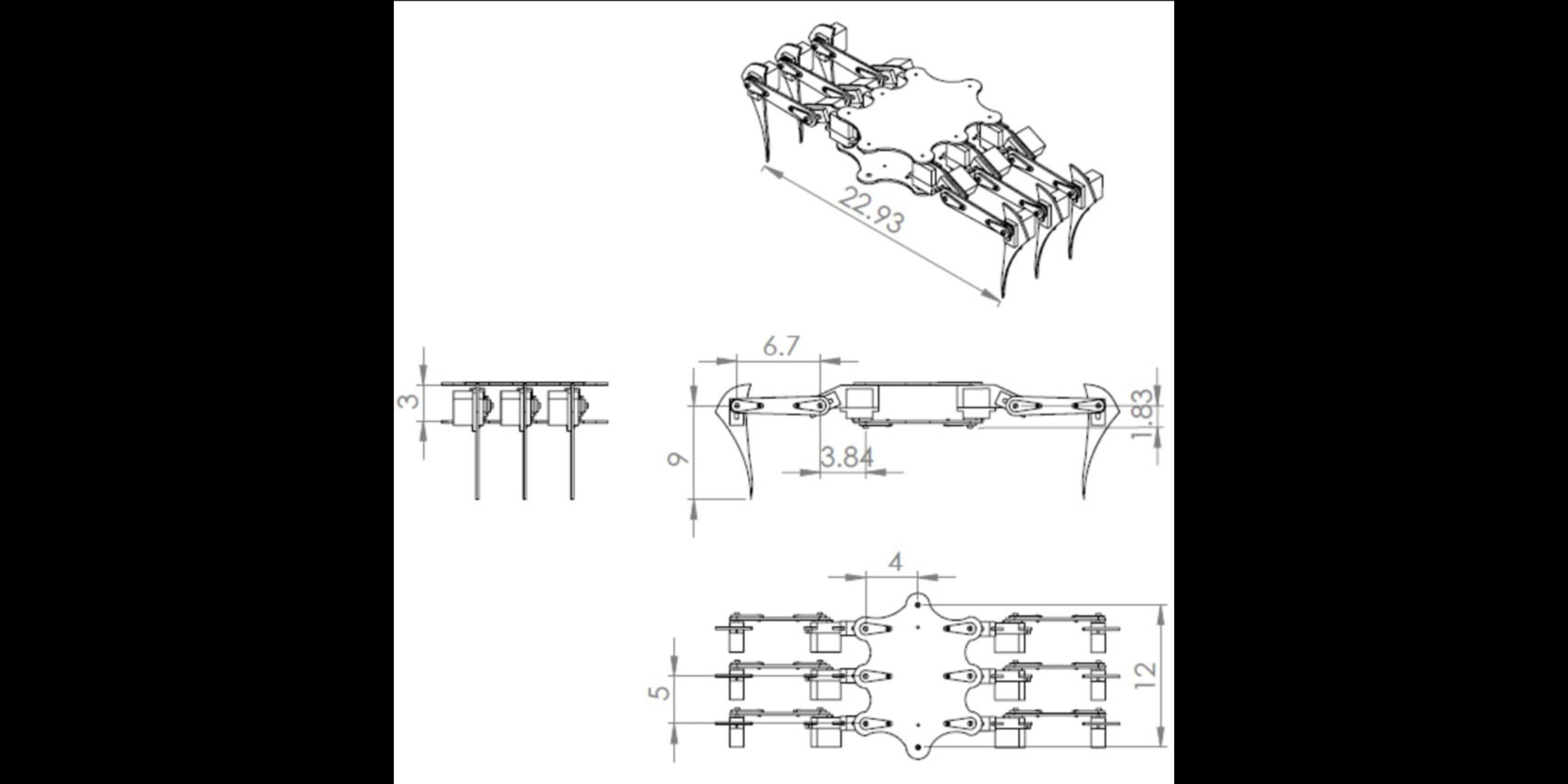
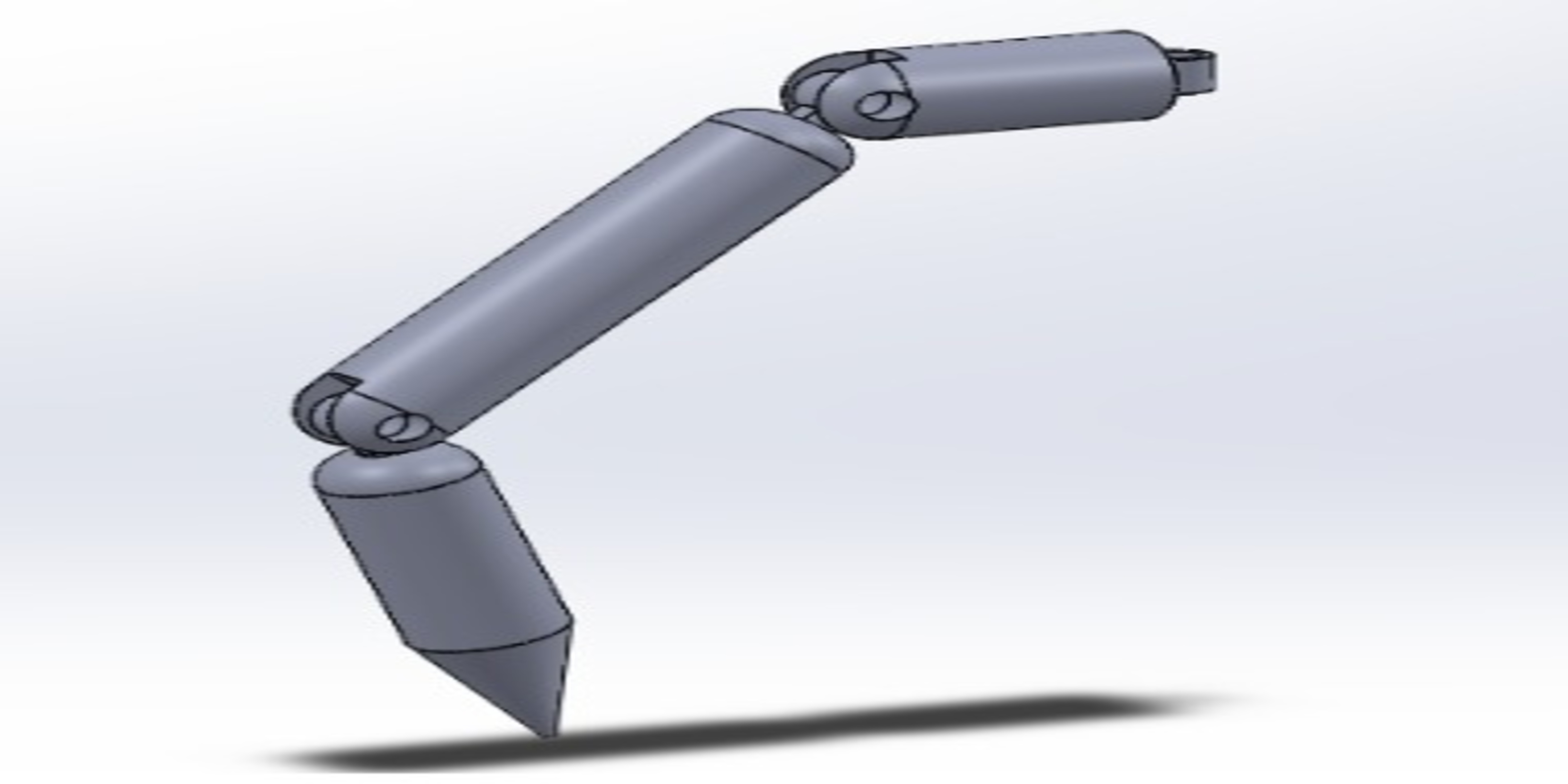
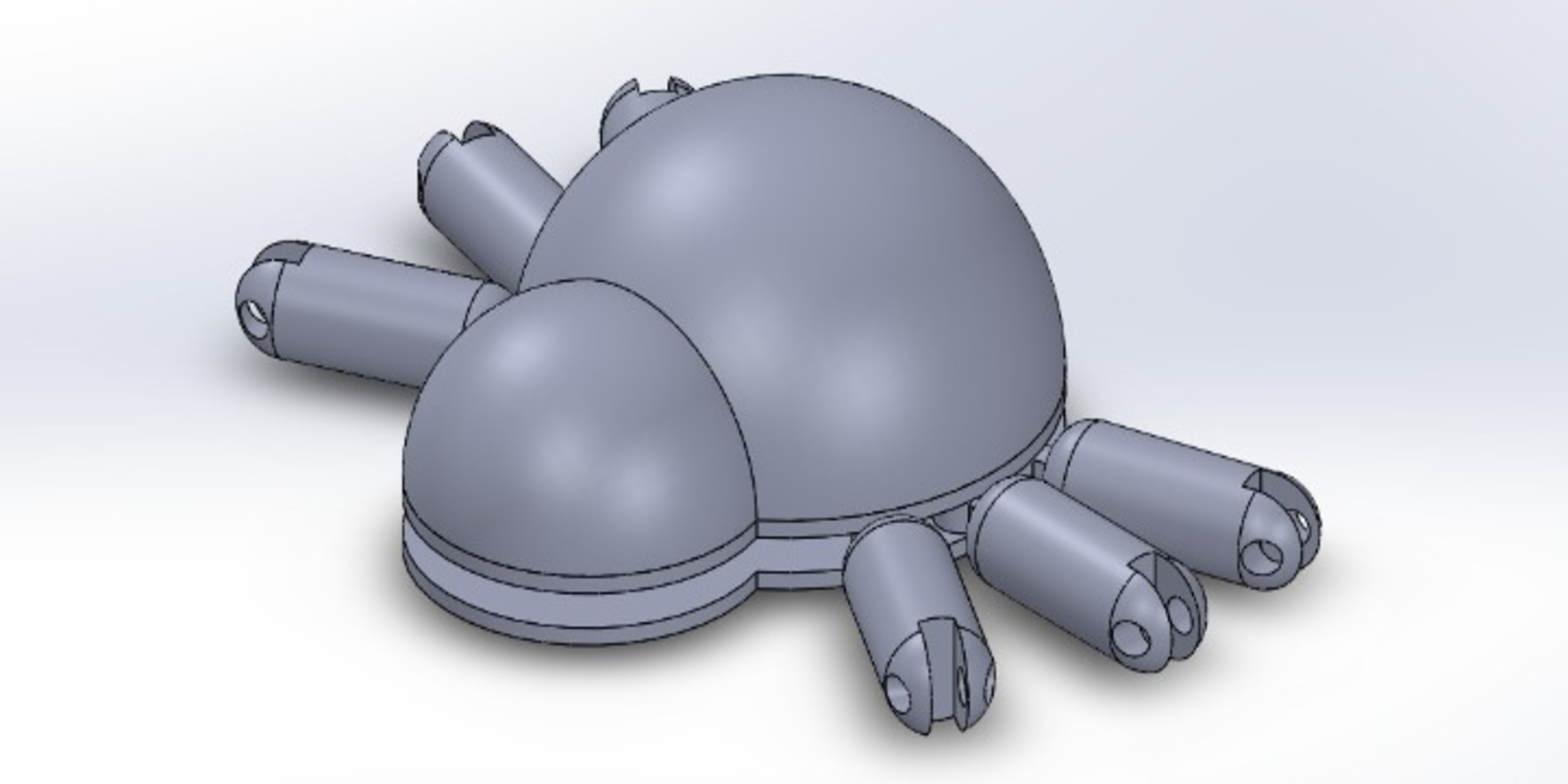
Modeling
The images below represent initial CAD model views of the hexapod legs, which will be made using a 3D printer. The first model brings a view of the raspod with structures mostly composed of right angles, in order to appropriate the robotic aesthetics to the project. The option of grooves along the piece was made aiming to fit the servo motor, allowing the passage of the wires in an easier way.