


Project information
- Category: Mapping
- Function: 3D mapping system based on two mono cameras.
- Project date: 2021 - 2022
- Project URL: https://rascimatec.github.io/project-mapvision.html
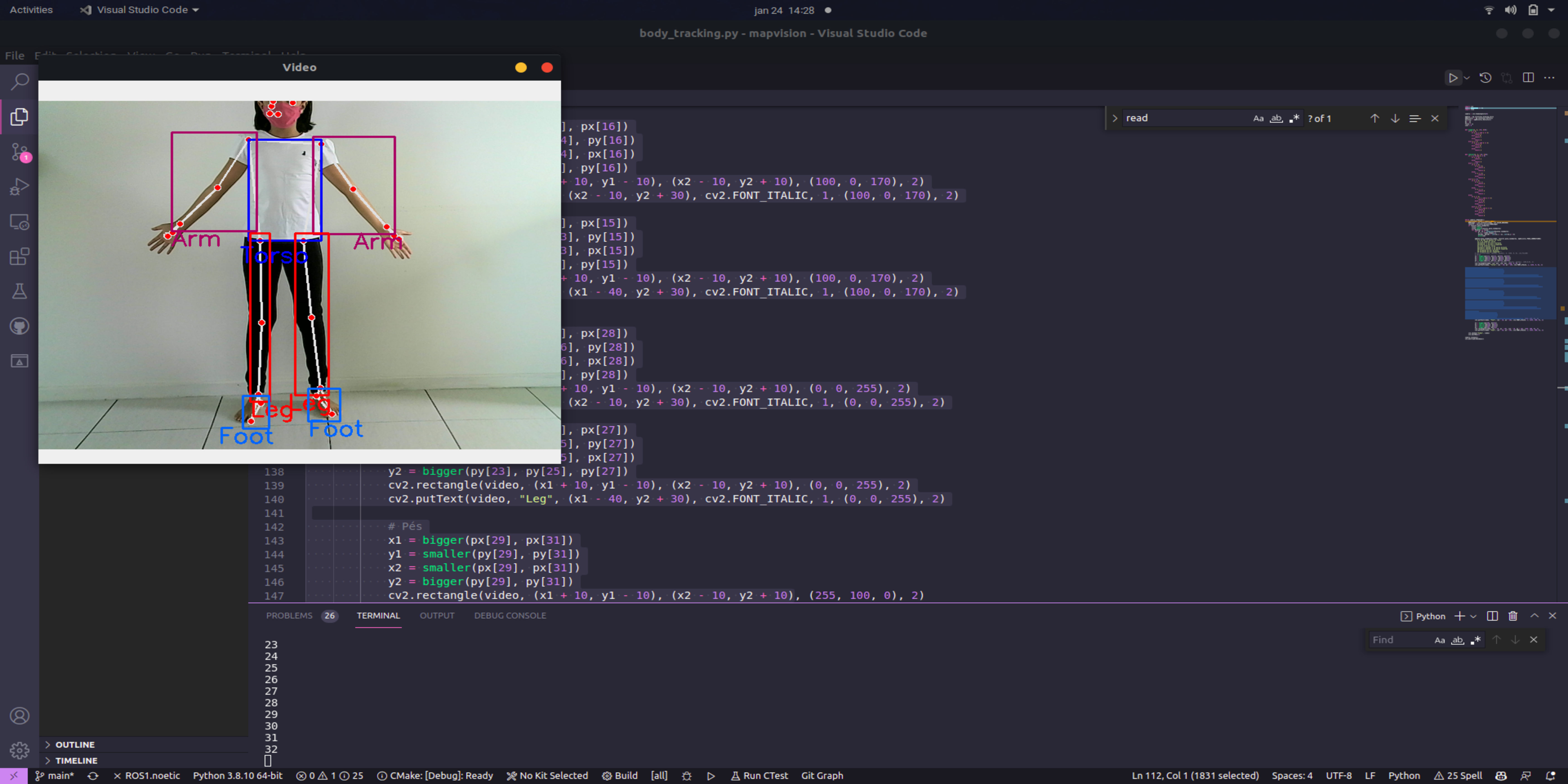
PROJECT MAPVISION
MapVision is a 3D mapping system based on two mono cameras. Currently, it aims to reconnaissance remote areas and thus guide the movement of robots that wish to travel through them, as is the case with RASPode, as well as detect victims of landslides
in these locations. In addition, Map will be able to recognize people registered in its online database, and may be associated in the future with the other robots of the IEEE RAS CIMATEC.
With this first stage of the project being finalized, the group is already developing the 3D mapping system and later the results will be posted on this page. In addition, more information will be released on this page soon about
how the workspace works in ROS and how the code is being organized (you can access it in the github repository). Furthermore, for those who want to test this version of the system.