

Project informations
- Category: Competição
- Function: Participate in the IEEE Very Small Size Soccer competition
- Project date: 2021- 2022
- Project URL: https://ieeecimatec.github.io/project-competieeecao/
PROJECT COMPETIEEEÇÃO
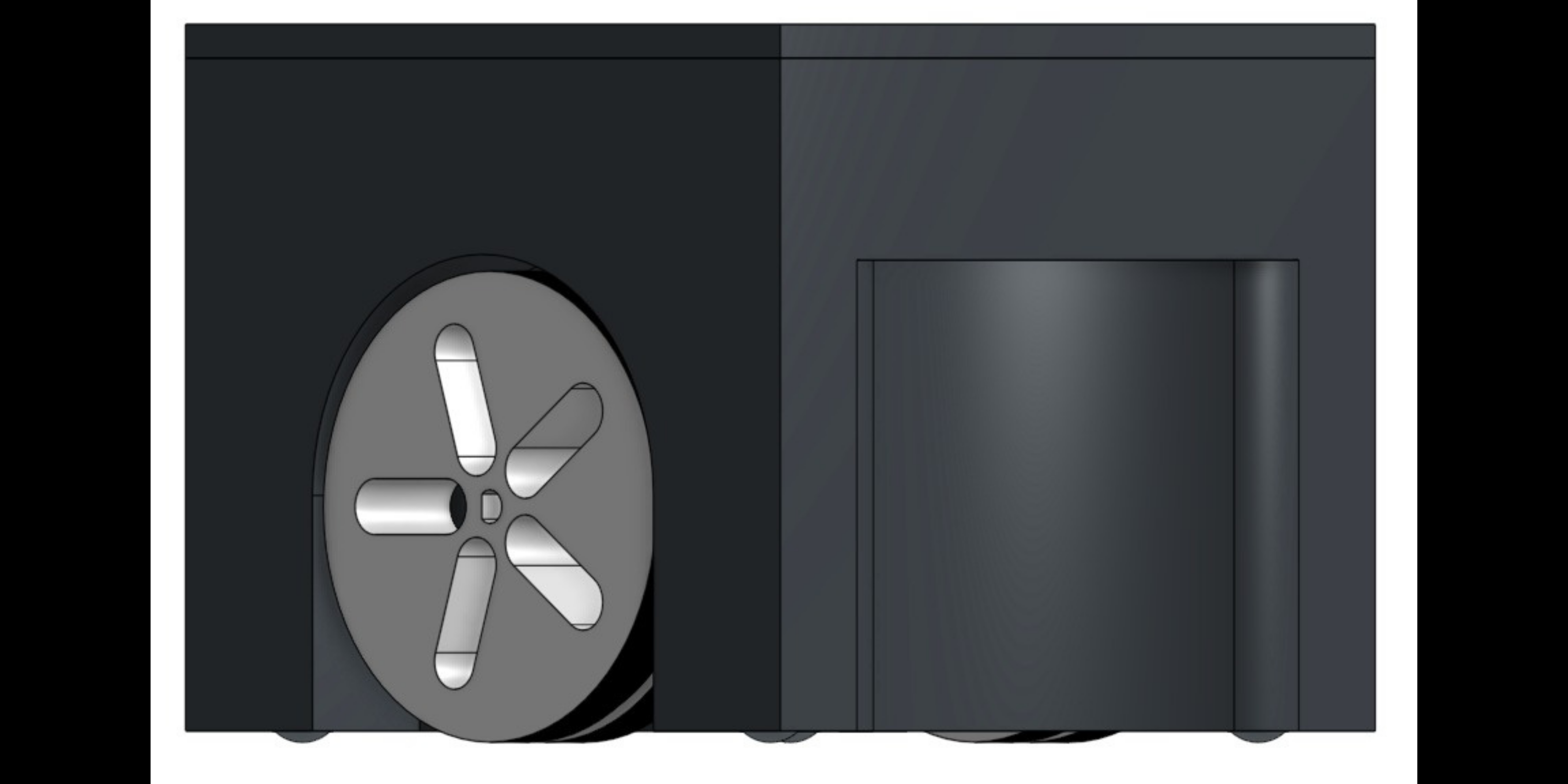
Currently, our team's goal is to develop a team of robots for the Very Small Soccer category, where all the "players" have a defined size of at most 7.5 x 7.5 x 7.5 cm, and can be freely chosen from the that meets the size limits. The design of the robots
and the arena were executed in 3D modeling, based on CAD techniques.
To control the movements during the match, computer vision is used through a camera located at the top of the arena. It has the function of capturing information from the field and robots and passing them on to the command computer,
responsible for analyzing the data through an algorithm developed by the members of the competition team.
After processing the information, the decision of the player's next move is taken in real time and sent to the robot that obeys the command. In the world of robotics competitions, different and creative strategies are of fundamental
importance to guarantee good results. Within the IEEE, we are always looking to develop new ideas on several fronts, so we believe that our competition team will be of immense value to the RAS chapter.